19 व्या आणि 20 व्या शतकात विजेच्या क्षेत्रातील विज्ञान वेगाने विकसित झाले, ज्यामुळे इलेक्ट्रिक इंडक्शन मोटर्सची निर्मिती झाली. अशा उपकरणांच्या मदतीने, औद्योगिक उद्योगाचा विकास खूप पुढे गेला आहे आणि आता एसिंक्रोनस इलेक्ट्रिक मोटर्स वापरून पॉवर मशीनशिवाय वनस्पती आणि कारखान्यांची कल्पना करणे अशक्य आहे.
सामग्री
देखावा इतिहास
असिंक्रोनस इलेक्ट्रिक मोटरच्या निर्मितीचा इतिहास 1888 मध्ये सुरू होतो, जेव्हा निकोला टेस्ला इलेक्ट्रिक मोटर सर्किटचे पेटंट घेतले, त्याच वर्षी इलेक्ट्रिकल अभियांत्रिकी क्षेत्रातील आणखी एक शास्त्रज्ञ डॉ. गॅलिलिओ फेरारिस असिंक्रोनस मशीनच्या ऑपरेशनच्या सैद्धांतिक पैलूंवर एक लेख प्रकाशित केला.
1889 मध्ये रशियन भौतिकशास्त्रज्ञ मिखाईल ओसिपोविच डोलिवो-डोब्रोव्होल्स्की अॅसिंक्रोनस थ्री-फेज इलेक्ट्रिक मोटरसाठी जर्मनीमध्ये पेटंट प्राप्त केले.

या सर्व आविष्कारांमुळे इलेक्ट्रिकल मशीन्स सुधारणे शक्य झाले आणि उद्योगात इलेक्ट्रिकल मशीनचा मोठ्या प्रमाणात वापर झाला, ज्यामुळे उत्पादनातील सर्व तांत्रिक प्रक्रियांना लक्षणीय गती मिळाली, कामाची कार्यक्षमता वाढली आणि श्रम तीव्रता कमी झाली.
याक्षणी, उद्योगात वापरली जाणारी सर्वात सामान्य इलेक्ट्रिक मोटर म्हणजे डोलिव्हो-डोब्रोव्होल्स्कीने तयार केलेल्या इलेक्ट्रिक मशीनचा नमुना.
एसिंक्रोनस मोटरच्या ऑपरेशनचे डिव्हाइस आणि तत्त्व
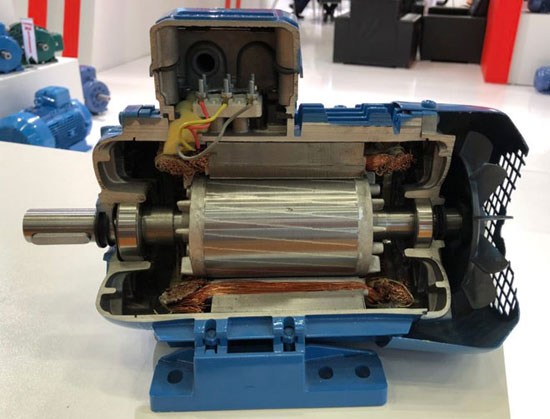
इंडक्शन मोटरचे मुख्य घटक स्टेटर आणि रोटर आहेत, जे हवेच्या अंतराने एकमेकांपासून वेगळे केले जातात. इंजिनमधील सक्रिय कार्य विंडिंग्ज आणि रोटरच्या कोरद्वारे केले जाते.
रोटरची गती आणि इलेक्ट्रोमॅग्नेटिक फील्डच्या रोटेशनची वारंवारता यांच्यातील फरक म्हणून इंजिनची असिंक्रोनी समजली जाते.
स्टेटर - हा इंजिनचा एक निश्चित भाग आहे, ज्याचा कोर इलेक्ट्रिकल स्टीलचा बनलेला आहे आणि फ्रेममध्ये बसवला आहे. पलंग चुंबकीय नसलेल्या सामग्रीपासून कास्ट पद्धतीने बनविला जातो (कास्ट लोह, अॅल्युमिनियम). स्टेटर विंडिंग्स ही तीन-चरण प्रणाली आहे ज्यामध्ये तारा 120 अंशांच्या विक्षेपण कोनासह खोबणीत घातल्या जातात. "तारा" किंवा "त्रिकोण" योजनांनुसार विंडिंगचे टप्पे मानकपणे नेटवर्कशी जोडलेले आहेत.

रोटर तो इंजिनचा फिरणारा भाग आहे. एसिंक्रोनस इलेक्ट्रिक मोटर्सचे रोटर्स दोन प्रकारचे असतात: गिलहरी-पिंजरा आणि फेज रोटर्ससह. हे प्रकार रोटर विंडिंगच्या डिझाइनमध्ये एकमेकांपासून भिन्न आहेत.
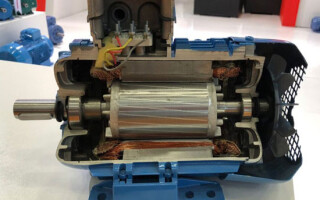
असिंक्रोनस गिलहरी-पिंजरा मोटर
या प्रकारच्या इलेक्ट्रिक मशीनचे प्रथम पेटंट एम.ओ. Dolivo-Dobrovolsky आणि लोकप्रियपणे म्हणतात "गिलहरी चाक" संरचनेच्या देखाव्यामुळे. शॉर्ट-सर्किट केलेल्या रोटर विंडिंगमध्ये तांब्याच्या रॉड्स असतात ज्यामध्ये रिंग असतात (अॅल्युमिनियम, पितळ) आणि रोटर कोरच्या वळणाच्या खोबणीमध्ये घातले. या प्रकारच्या रोटरमध्ये हलणारे संपर्क नसतात, म्हणून या मोटर्स ऑपरेशनमध्ये अतिशय विश्वासार्ह आणि टिकाऊ असतात.
फेज रोटरसह इंडक्शन मोटर
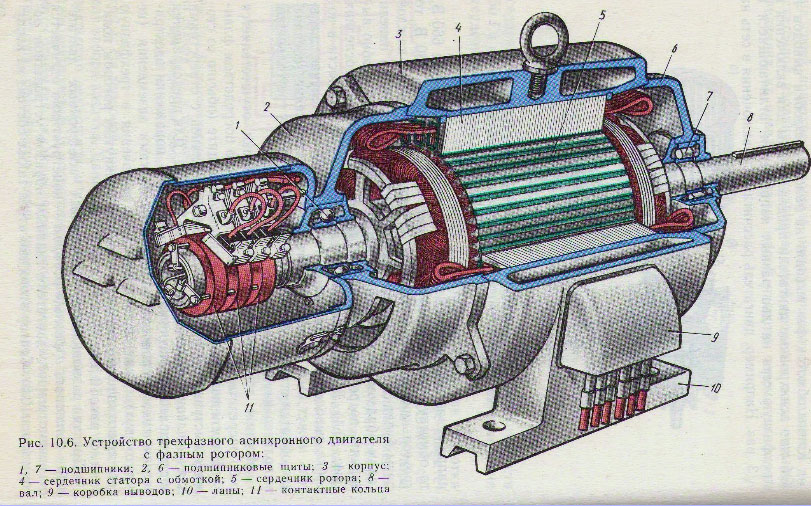
असे डिव्हाइस आपल्याला विस्तृत श्रेणीमध्ये कामाची गती समायोजित करण्यास अनुमती देते. फेज रोटर एक तीन-चरण विंडिंग आहे, जो "तारा" किंवा त्रिकोण योजनांनुसार जोडलेला आहे. अशा इलेक्ट्रिक मोटर्समध्ये, डिझाइनमध्ये विशेष ब्रशेस असतात, ज्याद्वारे आपण रोटरची गती समायोजित करू शकता. जर अशा इंजिनच्या यंत्रणेमध्ये एक विशेष रिओस्टॅट जोडला गेला असेल, तर जेव्हा इंजिन सुरू होईल तेव्हा सक्रिय प्रतिकार कमी होईल आणि त्याद्वारे प्रारंभ होणारे प्रवाह कमी होतील, जे विद्युत नेटवर्क आणि स्वतः डिव्हाइसवर प्रतिकूल परिणाम करतात.
ऑपरेटिंग तत्त्व
जेव्हा स्टेटर विंडिंग्सवर विद्युत प्रवाह लागू केला जातो तेव्हा चुंबकीय प्रवाह होतो. टप्प्याटप्प्याने एकमेकांच्या सापेक्ष 120 अंशांनी स्थलांतर केले जात असल्याने, यामुळे, विंडिंग्समधील प्रवाह फिरतो. जर रोटर शॉर्ट-सर्किट असेल तर अशा रोटेशनसह, रोटरमध्ये एक करंट दिसून येतो, ज्यामुळे इलेक्ट्रोमॅग्नेटिक फील्ड तयार होते. एकमेकांशी संवाद साधताना, रोटर आणि स्टेटरच्या चुंबकीय क्षेत्रांमुळे इलेक्ट्रिक मोटरचा रोटर फिरतो. जर रोटर फेज असेल तर स्टेटर आणि रोटरवर एकाच वेळी व्होल्टेज लागू केले जाते, प्रत्येक यंत्रणेमध्ये चुंबकीय क्षेत्र दिसून येते, ते एकमेकांशी संवाद साधतात आणि रोटर फिरवतात.
असिंक्रोनस मोटर्सचे फायदे
| गिलहरी-पिंजरा रोटर सह | फेज रोटर सह |
|---|---|
| 1. साधे उपकरण आणि लॉन्च सर्किट | 1. लहान प्रारंभिक प्रवाह |
| 2. कमी उत्पादन खर्च | 2. रोटेशन गती समायोजित करण्याची क्षमता |
| 3. वाढत्या लोडसह, शाफ्टची गती बदलत नाही | 3. वेग न बदलता लहान ओव्हरलोडसह कार्य करा |
| 4. अल्पकालीन ओव्हरलोड्स सहन करण्यास सक्षम | 4. स्वयंचलित प्रारंभ लागू केला जाऊ शकतो |
| 5. ऑपरेशनमध्ये विश्वसनीय आणि टिकाऊ | 5. मोठा टॉर्क आहे |
| 6. सर्व कामकाजाच्या परिस्थितीसाठी योग्य | |
| 7. उच्च कार्यक्षमता आहे |
असिंक्रोनस मोटर्सचे तोटे
| गिलहरी-पिंजरा रोटर सह | फेज रोटर सह |
|---|---|
| 1. रोटर गती समायोज्य नाही | 1. मोठे परिमाण |
| 2. लहान प्रारंभ टॉर्क | 2. कार्यक्षमता कमी आहे |
| 3. उच्च प्रारंभिक प्रवाह | 3. ब्रश परिधान झाल्यामुळे वारंवार देखभाल |
| 4. काही डिझाइनची जटिलता आणि हलत्या संपर्कांची उपस्थिती |
एसिंक्रोनस मोटर्स उत्कृष्ट यांत्रिक वैशिष्ट्यांसह अतिशय कार्यक्षम उपकरणे आहेत, ज्यामुळे ते वापराच्या वारंवारतेमध्ये आघाडीवर आहेत.
ऑपरेटिंग मोड

एसिंक्रोनस प्रकारची इलेक्ट्रिक मोटर ही एक सार्वत्रिक यंत्रणा आहे आणि ऑपरेशनच्या कालावधीसाठी अनेक मोड आहेत:
- सतत;
- अल्पकालीन;
- नियतकालिक;
- वारंवार-अल्पकालीन;
- विशेष.
सतत मोड - एसिंक्रोनस डिव्हाइसेसच्या ऑपरेशनचे मुख्य मोड, जे स्थिर लोडसह शटडाउनशिवाय इलेक्ट्रिक मोटरच्या सतत ऑपरेशनद्वारे वैशिष्ट्यीकृत आहे. ऑपरेशनचा हा मोड सर्वात सामान्य आहे, सर्वत्र औद्योगिक उपक्रमांमध्ये वापरला जातो.
क्षणिक मोड - ठराविक वेळेसाठी स्थिर भार पोहोचेपर्यंत कार्य करते (10 ते 90 मिनिटे), शक्य तितक्या गरम होण्यासाठी वेळ नसणे. त्यानंतर ते बंद होते. कार्यरत पदार्थांचा पुरवठा करताना हा मोड वापरला जातो (पाणी, तेल, वायू) आणि इतर परिस्थिती.
नियतकालिक मोड - कामाच्या कालावधीचे विशिष्ट मूल्य असते आणि कामाच्या चक्राच्या शेवटी ते बंद केले जाते. ऑपरेटिंग मोड स्टार्ट-वर्क-स्टॉप. त्याच वेळी, ते अशा वेळेसाठी बंद होऊ शकते ज्या दरम्यान त्याला बाह्य तापमानात थंड होण्यासाठी आणि पुन्हा चालू करण्याची वेळ नसते.
मधूनमधून मोड - इंजिन जास्तीत जास्त गरम होत नाही, परंतु बाह्य तापमानाला थंड होण्यासाठी देखील वेळ नाही. हे लिफ्ट, एस्केलेटर आणि इतर उपकरणांमध्ये वापरले जाते.
विशेष व्यवस्था - समावेशाचा कालावधी आणि कालावधी अनियंत्रित आहे.
इलेक्ट्रिकल अभियांत्रिकीमध्ये, इलेक्ट्रिकल मशीन्सच्या उलटतेचे एक तत्त्व आहे - याचा अर्थ असा आहे की डिव्हाइस विद्युत उर्जेचे यांत्रिक उर्जेमध्ये रूपांतरित करू शकते आणि विरुद्ध क्रिया करू शकते.
असिंक्रोनस इलेक्ट्रिक मोटर्स देखील या तत्त्वाशी सुसंगत असतात आणि त्यांच्याकडे मोटर आणि जनरेटर मोड असतो.
मोटर मोड - एसिंक्रोनस इलेक्ट्रिक मोटरच्या ऑपरेशनचा मुख्य मोड. जेव्हा विंडिंग्सवर व्होल्टेज लागू केले जाते, तेव्हा एक इलेक्ट्रोमॅग्नेटिक टॉर्क उद्भवतो, रोटरला शाफ्टसह ड्रॅग करतो आणि अशा प्रकारे शाफ्ट फिरू लागतो, इंजिन उपयुक्त काम करत स्थिर गतीपर्यंत पोहोचते.
जनरेटर मोड - रोटरच्या रोटेशन दरम्यान मोटर विंडिंगमध्ये विद्युत प्रवाहाच्या उत्तेजनाच्या तत्त्वावर आधारित. जर मोटर रोटर यांत्रिकरित्या फिरवला असेल तर स्टेटर विंडिंग्सवर इलेक्ट्रोमोटिव्ह फोर्स तयार होतो, विंडिंग्समध्ये कॅपेसिटरच्या उपस्थितीत, कॅपेसिटिव्ह करंट उद्भवते.जर कॅपेसिटरची क्षमता विशिष्ट मूल्य असेल तर, इंजिनच्या वैशिष्ट्यांवर अवलंबून, जनरेटर स्वयं-उत्तेजित होईल आणि तीन-चरण व्होल्टेज सिस्टम दिसेल. अशा प्रकारे, गिलहरी-पिंजरा मोटर जनरेटर म्हणून काम करेल.
असिंक्रोनस मोटर्सचे वेग नियंत्रण
एसिंक्रोनस इलेक्ट्रिक मोटर्सच्या फिरण्याच्या गतीचे नियमन करण्यासाठी आणि त्यांच्या ऑपरेटिंग मोडवर नियंत्रण ठेवण्यासाठी, खालील पद्धती आहेत:
- वारंवारता - जेव्हा इलेक्ट्रिकल नेटवर्कमधील प्रवाहाची वारंवारता बदलते, तेव्हा इलेक्ट्रिक मोटरच्या रोटेशनची वारंवारता बदलते. या पद्धतीसाठी, फ्रिक्वेन्सी कन्व्हर्टर नावाचे उपकरण वापरले जाते;
- रिओस्टॅटिक - जेव्हा रोटरमधील रिओस्टॅटचा प्रतिकार बदलतो, तेव्हा घूर्णन गती बदलते. ही पद्धत प्रारंभिक टॉर्क आणि गंभीर स्लिप वाढवते;
- पल्स - एक नियंत्रण पद्धत ज्यामध्ये मोटरवर विशेष प्रकारचे व्होल्टेज लागू केले जाते.
- इलेक्ट्रिक मोटरच्या ऑपरेशन दरम्यान "स्टार" सर्किटपासून "त्रिकोण" सर्किटमध्ये विंडिंग स्विच करणे, ज्यामुळे प्रारंभ होणारे प्रवाह कमी होतात;
- गिलहरी-पिंजरा रोटर्ससाठी पोल जोडी बदल नियंत्रण;
- जखमेच्या रोटरसह मोटर्ससाठी प्रेरक अभिक्रियाचे कनेक्शन.
इलेक्ट्रॉनिक प्रणालींच्या विकासासह, विविध एसिंक्रोनस प्रकारच्या इलेक्ट्रिक मोटर्सचे नियंत्रण अधिक कार्यक्षम आणि अचूक होत आहे. अशी इंजिने जगात सर्वत्र वापरली जातात, अशा यंत्रणांद्वारे केल्या जाणार्या कार्यांची विविधता दररोज वाढत आहे आणि त्यांची गरज कमी होत नाही.
तत्सम लेख: